

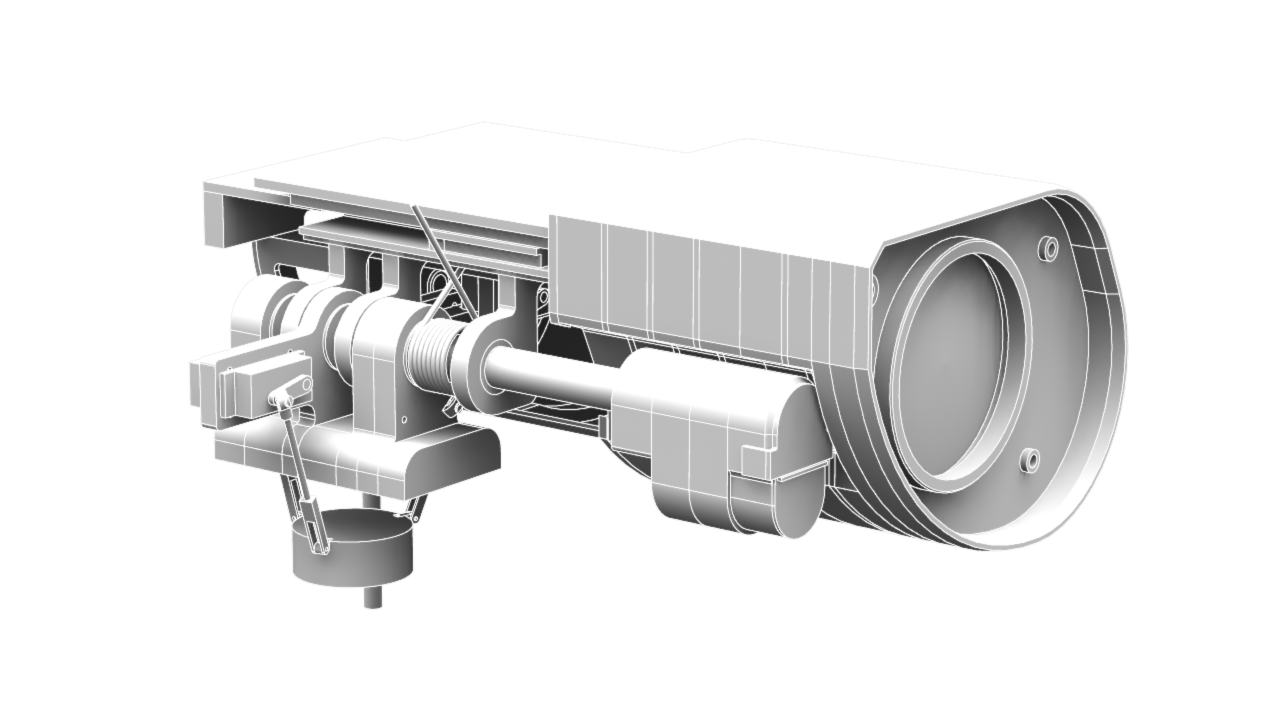
It seems to work using the motion study in Solidworks but, it seems awfully flimsy.Since the specifications were not listed for the servo arm screw sizes, I guessed that it would probably be an M3 screw. With that information, the only ball rod ends I could find were M3's... The pins between the clevis and the arm is a M2... so, I'm a little worried about that. Those three linkages are holding up the entire head! I'm trying to find the smallest gas spring or RC spring shock to attached between the swivel base (the very bottom piece) and the pivot base in order to relieve some stress off of those linkages. Unfortunately, the shortest pieces I could find were 65mm long - I need something between 40-50mm... If it doesn't work out, I'll end up just making it a fixed joint with no pitch and roll.
In other news, I've added a torsion spring halfway down the pivot shaft to assist the servos that will be pivoting the eyes. The assortment of springs were limited for the 3/4 rod so hopefully this one will work.
Now, I'll be working on the eye pivot servo mount/linkage and the reinforcing the head tilt linkages on the bottom.
Edit: Here's an updated mechanism for the neck:
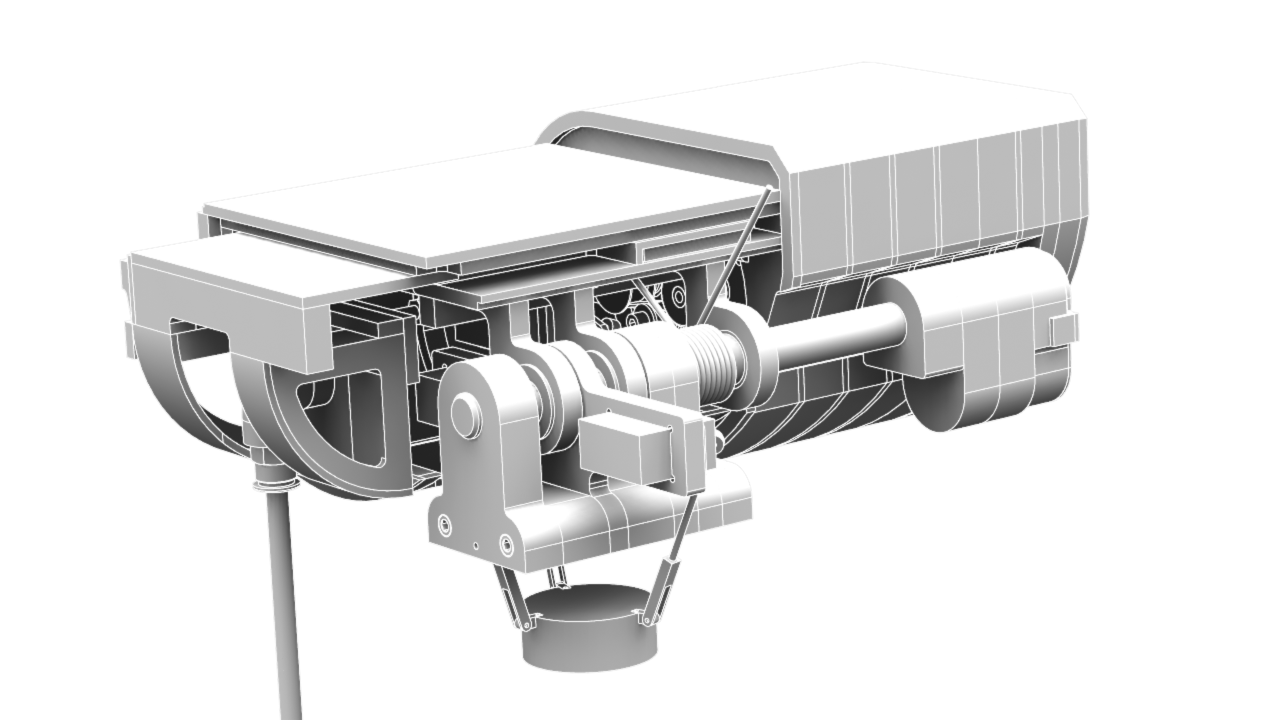
I flipped the servo and the two linkages to the front side of the swivel base. Hopefully, it'll allow the ball rod ends more clearance than before. What I'm also trying to figure out is at which location the servos will be stressed the least... it's already bad enough that the neck joint is so far back from the front of the head...
No comments:
Post a Comment